viernes, 16 de noviembre de 2018
Nuevo Proyecto
El 5 de Noviembre empezamos un nuevo proyecto para el Segundo parcial. El tema el tema de este proyecto es crear un auto de carreras que pueda controlarse automáticamente por medio de bluetooth o por un control remoto, nosotros buscamos diseños y no lo haremos en base a un auto de carreras o que ya esté creado sino en una inversión nuestra, usaremos servomotores para que las ruedas puedan girar, una madera fina para poder ahí todas las conexiones y que se pueda sostener bien.
Diario 4
Hoy 15 de Octubre del 2018, no pudimos avanzar mucho por qué hubo minuto cívico lo que se llevo prácticamente toda la hora de clase, cuando el minuto cívico termino faltaban como 20 minutos lo que solo servia para cojer cables y medio ubicarlos. Pero bueno, mi compañera, luisana por fin se puso las pilas y ya estaba haciendo y avanzando un poco de lo que nos faltaba.
Bitacora de robotica
Tratamos de completar las conexiones que nos faltaban para que nosotros podamos tener todo el trabajo completo, en estas ya últimas clases el resto de mi grupo recién se puso las pilas, ya solo estábamos añadiendo el último componente y es una puerta electrónica ya estaba hecha solo faltaba configurar el arduino y todas esas cosas. 
domingo, 7 de octubre de 2018
Diario 3
El 1 de octubre estuvimos las dos horas en la sala de mecánica y vaos a comprar mas aerosoles de colores para pintar lo último que nos ha faltado, mi compañero se puso ha hacer unas repisas muy chiquitas para lo que es la biblioteca mientras que mi compañera y yo seguimos trabajando con las conexiones, ya falta muy poco, hicimos los huecos para poner los leds y con un poco de ayuda lo logramos. 
domingo, 30 de septiembre de 2018
bitacora 2
En esta clase nos quedamos en el salón de informática, de nuevo mi grupo no hizo nada, se fue para otro lado a conversar o hacer quien sabe qué pero me puse ha hacer una conexión con el arduino para después ponerle el código que utilizamos, no pude avanzar mucho sin la ayuda de mis compañeros pero se hace lo que se puede, no tengo aún todos los materiales pero con lo poco que tengo pude hacer la conexión.
Diario 2
El 24 de Septiembre trabajamos las dos horas en la sala de mecánica y en esta clase pudimos avanzar las conexiones, mis compañeros casi ni me ayudaron, pero fuera de eso le pedí ayuda a un compañero y avance el la conexión de las led, los pude avanzar y ambos leds prendieron , en la casa hice dos huequitos uno arriba de lo que es la cocina el otro abajito de un estante para que cuando se conecte saldrá la luz y se verá bien llamativo.

sábado, 22 de septiembre de 2018
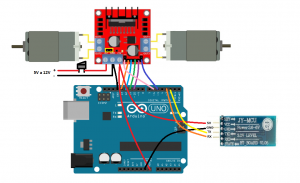
Bitacora de Robotica
A nuestro código le añadimos algo más por lo que el día jueves trabajamos en la sala de robotica, el cual sera un servomotor que abrirá y cerrara la entrada del área donde se ubicara el automóvil.
Incluimos:
int valorpul = digitalRead(pulsador);
if(valorpul== HIGH)
{
if(f==0)
{
f=1;
}
else
{
f=0;
}
}
if(f==1)
{
myservo.write(90);
}
else
{
myservo.write(0);
}
}
Diario de Trabajo del Cuarto Parcial
Luego de nuestras vacaciones retornamos a clase y tuvimos 2 horas en la clase de mecánica para poder avanzar los últimos detalles de nuestra maqueta, lastimosamente mi grupo no tiene los materiales para hacer las conexiones, tendremos que conseguirlas lo antes pronto posible para no quedarnos muy atrás con los demás grupos
jueves, 30 de agosto de 2018
Clase 20
Revisión
El 27 de Agosto los profesores, el míster Edgar de Mecánica y la Miss Rosa de informática nos hicieron elegir papeles al azar para ver el orden en el que nos calificarían a cada uno, a mi grupo le toco el número 5, tuvimos que ponerle los últimos detalles pero lo presentamos, no sabemos cuanto sacamos pero espero que sea una nota que refleje el esfuerzo que hemos puesto en esa maqueta .
Clase 19
Construcción de maqueta
El 20 de Agosto pasamos las dos horas en la sala de mecánica para avanzar más lo de mecánica, terminamos de pegar y cortar las paredes pero no pudimos avanzar mucho con las conexiones ya que nadie aparte de mi persona, en mi grupo, tiene los materiales necesarios que se utilizarían .
Clase 18
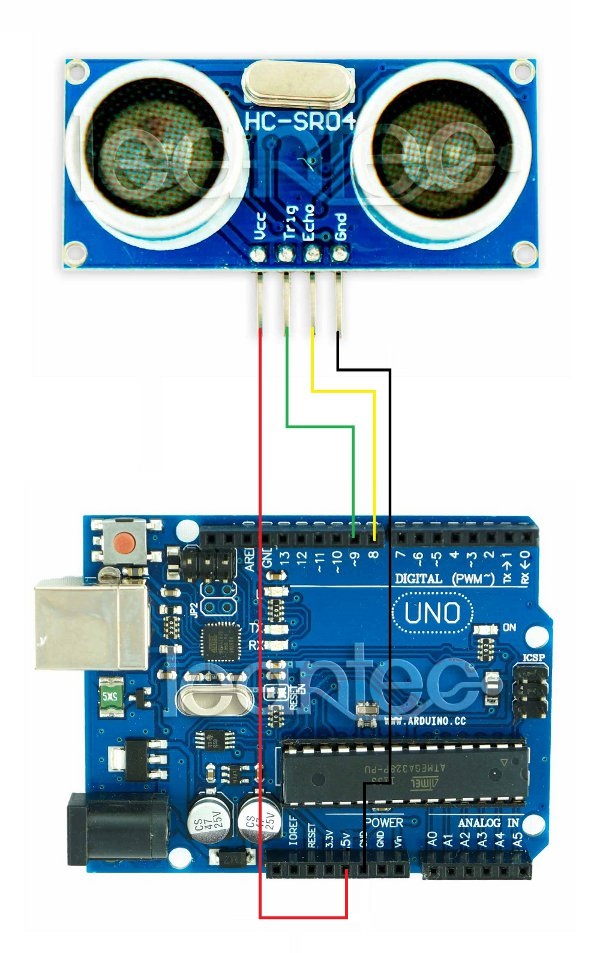
Práctica #2: Sensor Ultrasónico HC-SR04
El 16 de Agosto comenzamos a configurar nuestro sensor de movimiento empleando un sensor de ultrasonido, con ayuda de un vídeo hicimos las conexiones y la programación. El código que se encuentra en el video es este:
const int trigPin = 9;
const int echoPin = 10;
const int buzzer = 11;
const int ledPin = 13;
// define variables
long duration;
int distance;
int safetyDistance;
void setup() {
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
pinMode(buzzer, OUTPUT);
pinMode(ledPin, OUTPUT);
Serial.begin(9600); // Starts the serial communication
}
void loop() {
// Aqui hace que el ultrasonido se prepare para enviar las pulsasiones
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Enviara infinitamente por 10 microsegundos pulsaciones
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// La onda de sonido recibida la transforma en segundos
duration = pulseIn(echoPin, HIGH);
// Calculating the distance
distance= duration*0.034/2;
safetyDistance = distance;
if (safetyDistance <= 5){
digitalWrite(buzzer, HIGH);
digitalWrite(ledPin, HIGH);
}
else{
digitalWrite(buzzer, LOW);
digitalWrite(ledPin, LOW);
}
// Prints the distance on the Serial Monitor
Serial.print("Distance: ");
Serial.println(distance);
}
Clase 17
Robotics Workshop
El pasado 6 de Agosto, estuvo una persona muy importante en el colegio, Kyle Villota, fue invitado a el campo donde probo experiencias similares a los de astronautas, como una maquina para controlar el mareo, trajes espaciales, y la creacion de un modelo a escala pequeño de un cohete. 
En esta foto están mis amigos y yo con nuestro trabajo y él a lado nuestro, el nos impulso a seguir este camino y afición por la róbotica y en mi opinión aprendí que construir con legos y combinarlos con tecnología puede dar un buen resultado y es muy divertido
Clase 16
Investigación de componentes electrónicos
LDR:

Un LDR es un resistor que varía su valor de resistencia eléctrica dependiendo de la cantidad de luz que incide sobre él. Se le llama, también, fotorresistor o fotorresistencia. El valor de resistencia eléctrica de un LDR es bajo cuando hay luz incidiendo en él (en algunos casos puede descender a tan bajo como 50 ohms) y muy alto cuando está a oscuras (puede ser de varios megaohms).
Los LDR se fabrican con un cristal semiconductor fotosensible como el sulfuro de cadmio (CdS). Esta celdas son sensibles a un rango amplio de frecuencias lumínicas, desde la luz infrarroja, pasando por la luz visible, y hasta la ultravioleta.
La variación de valor resistivo de un LDR tiene cierto retardo, qie es diferente si se pasa de oscuro a iluminado o de iluminado a oscuro.
Sensor Pir:
 Los detectores PIR (Passive Infrared) o Pasivo Infrarrojo, reaccionan sólo ante determinadas fuentes de energía tales como el calor del cuerpo humano o animales. Básicamente reciben la variación de las radiaciones infrarrojas del medio ambiente que cubre. Es llamado pasivo debido a que no emite radiaciones, sino que las recibe. Estos captan la presencia detectando la diferencia entre el calor emitido por el cuerpo humano y el espacio alrededor.
Los detectores PIR (Passive Infrared) o Pasivo Infrarrojo, reaccionan sólo ante determinadas fuentes de energía tales como el calor del cuerpo humano o animales. Básicamente reciben la variación de las radiaciones infrarrojas del medio ambiente que cubre. Es llamado pasivo debido a que no emite radiaciones, sino que las recibe. Estos captan la presencia detectando la diferencia entre el calor emitido por el cuerpo humano y el espacio alrededor.Sensor de Humedad:
 Resultado de imagen para sensor de humedadLos sensores de humedad se activan al recibir un cambio de la humedad ya sea a causa de factores químicos o físicos. A su vez, las corrientes de gas que s forman por causa de la condensación también es detectada por el sensor. La utilidad del mismo se demuestra en la etapa industrial, detectando las moléculas de agua de objetos que la humedad los puede afectar, y en los campos agrícolas tener una correcta humedad en el suelo es importante para la cosecha de ciertos alimentos.
Resultado de imagen para sensor de humedadLos sensores de humedad se activan al recibir un cambio de la humedad ya sea a causa de factores químicos o físicos. A su vez, las corrientes de gas que s forman por causa de la condensación también es detectada por el sensor. La utilidad del mismo se demuestra en la etapa industrial, detectando las moléculas de agua de objetos que la humedad los puede afectar, y en los campos agrícolas tener una correcta humedad en el suelo es importante para la cosecha de ciertos alimentos.Servomotor:
 Es un dispositivo electromecánico que tiene un pequeño motor, engranajes y una tarjeta de control. Se puede controlar en giros de 180° y también en giros constantes de 360°, se usa mayormente en la mecánica, electrónica y modelismo por su gran precisión. Se envía normalmente un pulso de 50 Hz para modelar los giros del motor por medio de pulsaciones.
Es un dispositivo electromecánico que tiene un pequeño motor, engranajes y una tarjeta de control. Se puede controlar en giros de 180° y también en giros constantes de 360°, se usa mayormente en la mecánica, electrónica y modelismo por su gran precisión. Se envía normalmente un pulso de 50 Hz para modelar los giros del motor por medio de pulsaciones.Motor reductor:
Resultado de imagen para motorreductor caracteristicasEn si, dispositivo de velocidad que contiene un reductor y un motor, la fuerza del motorreductor se debe al funcionamiento del reductor puesto que controla la fuerza empleada por el motor permitiendo controlar las cargas que va a usar. El tipo de motor se debe al reductor, clasificándolos en paralelos, perpendiculares y planetarios. Su utilización se emplea en la industria, donde en la carga de mercadería se moviliza, resumiendo en la movilización de múltiples objetos en los diferentes ámbitos y aumentando la información, en el transporte de maletas en aeropuertos.
Bluetooth HC-06:
Resultado de imagen para hc-06 arduinoEl modulo bluetooth es un componente alambrico que nos permite la conexión y configuración de circuitos electrónicos por medio de un micro-controlador. Es ideal para arduino por el hecho de que se configura utilizando comandos AT, junto con una buena adaptación a una protoboard sirve como una excelente opción para proyectos. Entre las funcionalidades es el uso de un dispositivo móvil para que se envíen señales a bluetooth y este lo reciba enviando ciertos comandos a un micro controlador que los procesara.
miércoles, 29 de agosto de 2018
Clase 15
Práctica #1: ARDUINO + LDR
Trabajamos en una actividad para iniciar el 3 parcial, hicimos el archivo de Gantt que nos dará apoyo a la hora de organizar nuestros tiempos para la correcta fabricación de la maqueta, ya que así sabremos que haríamos, cuando lo haríamos y quien lo haría. En la segunda hora hicimos los circuitos usando una protoboard, leds, resistencias, foto-resistencias y un micro-controlador arduino. Seguimos el siguiente gráfico: 
Configuramos los baudios para la recepción y transmisión de la información de la placa arduino con el ordenador, 9600 es una velocidad estándar receptada por muchas computadoras.
Código:
void setup() {
// put your setup code here, to run once:
pinMode(A0, INPUT);// PIN A0 COMO ENTRADA
Serial.begin(9600);//
}
void loop() {
// put your main code here, to run repeatedly:
Serial.println(analogRead(A0));// mostrar valores del pin A0
}
El 13 de Agosto avanzamos un poco más la maqueta y cuando ya llego la segunda hora subimos al salón de informática y configuramos el código, le añadimos más comandos para que este puede detectar el servomotor y la presencia del LDR.
Código :
#include <Servo.h>
Servo myservo;
int foto;// declaracion de la variable llamada foto
int led=2;// declaracion de variable entera para almacenar el
//pin del led
void setup() {
// put your setup code here, to run once:
pinMode(A0, INPUT);// PIN A0 COMO ENTRADA
pinMode(led,OUTPUT);//PIN 2 como salida
myservo.attach(3); // Servomotor conectado al pin 3
Serial.begin(9600);// Para vizualizar en la pantalla los valores
myservo.write(0); // Inicia con el servotor apagado
}
void loop() {
foto=analogRead(A0);//asignando a la variable el valor que lee
Serial.println(foto); // se mostrara los valores del LDR en Monitor serial
if(foto>500) // si el LDR envia una cantidad menor que 500 se apagara
{
digitalWrite(led,LOW);//apagar led
myservo.write(90); // el servomotor girara en 90°
}
else // le dice al arduino que si la condicion primera no se cumple haga otra
{
digitalWrite(led,HIGH);//encender led
myservo.write(180); // el servomotor se movera en 180°
}
}
Clase 14
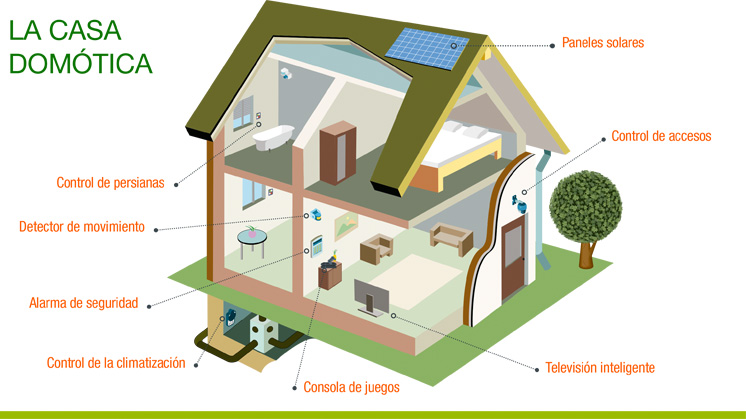
Etapa C: Creación i
Fuimos dos horas a Mecánica, en esas horas avanzamos un poco más con la maqueta de la casa domotica, ya se acercaba el 27 de Agosto que es cuando presentaríamos nuestro trabajo, tenemos que subir la Etapa C a la pagina en el blog donde se han subido los demás archivos, lo subimos con los siguientes pasos:
- Publicamos el archivo de drive.
- Copiamos su dirección de Incrustar.
- Pegamos el link en html del bloc.
- Escribimos al lado de iframe "Height="600" Width="600" " para hacer mas grande la interfaz.
- Publicamos en la web
Después avanzaríamos un poco más en grupo para hacer el plan lógico que es una tabla en excel diciendo las actividades que haríamos, los materiales que usaríamos, quien lo haría, cuanto tomaría y el día en el que lo hicimos.
martes, 28 de agosto de 2018
Clase 13
AVANCE DE LA MAQUETA
En esta hora nosotros fuimos a la sala de mecánica para poder avanzar un poco más, nuestro grupo se centro en primero pintar todo y organizar lo que necesitábamos, no hubo un gran avance gracias a que los demás integrantes del grupo no cumplieron con todos los materiales

Clase 12
SIMULACIÓN DEL VOTO ELECTRÓNICO
 El 23 de julio del 2018, nos dirigimos al laboratorio 2 ya que en esa hora nos toco hacer una simulación del programa que usaríamos el día de las elecciones de nuestro colegio, la pagina era sencilla, no tenia mucha complejidad. Para entrar y poder votar se necesita un Usuario y una Contraseña que se da cuando uno firma un papel, confirmando la participación en esta actividad, es la otra hora se terminaron uno que otro trabajo pendiente que no se había realizado
El 23 de julio del 2018, nos dirigimos al laboratorio 2 ya que en esa hora nos toco hacer una simulación del programa que usaríamos el día de las elecciones de nuestro colegio, la pagina era sencilla, no tenia mucha complejidad. Para entrar y poder votar se necesita un Usuario y una Contraseña que se da cuando uno firma un papel, confirmando la participación en esta actividad, es la otra hora se terminaron uno que otro trabajo pendiente que no se había realizado miércoles, 15 de agosto de 2018
Clase 11
Práctica #1: Control de LED y Servo con LDR (83219)
El 19 de julio continuamos con las prácticas en el laboratorio repasando todo lo que habíamos posteriores, entre las cosas pero volvieron a explicar esta el Protoboard que contiene al principio y al final dos líneas, una negativa y otra positiva, en medio tenemos lineas que funcionan en perpendicular a las de alimentación un servomotor sirve por medio de imanes que dan vueltas al llegarles electricidad, hay distintos materiales conductores que son metales, los aislantes no conducen la electricidad como madera y hule, la electricidad se puede pasar mediante dos formas de circuitos, la serie o de forma paralelalos de serie están uno detrás del otro, los paralelos comparten los voltios pero el amperaje sera mayor
martes, 14 de agosto de 2018
Clase 10
Desarrollo de ideas
En la primera hora estuvimos trabajando en la sala de mecánica en dónde nos pusimos acortar el cartón que habíamos traído para después pegarlo en la tabla y que estos cartones no sirvan de separador para las habitaciones ,tenemos que apurarnos y trabajar un poco más rápido para así no quedarnos atrasados con el proyecto. En la siguiente hora fuimos al salón de informática y nos tomaron la lección, también hicimos el archivo de desarrollo de ideas donde creamos un gráfico que nos ayudaba a calificar nuestra nuestros bocetos
viernes, 13 de julio de 2018
Clase 9
Bitácora de Indagación y Análisis
En las horas que nos dieron para trabajar el archivo de Indagación y Analisis, hicimos las actividades para completar todo de manera correcta. En la sección de Problema y Justificación, pusimos como queriamos que sea y el objetivo de la misma, para tener más ayuda sobra como deberiamos hacer todo entrevistamos a los padres de las personas de muestro grupo. En el Plan de Investigación priorizamos, pusimos en un cuadro Alto, Medio, bajo, lo que deberia contener, que cosas y como deberia ser nuestra casa domotica. Investigamos modelos ya hechos e información sobre el tema fue en Análisis de Productos Existentes, con esas ideas pudimos crear una tabla con los aspectos que deberíamos incluir y evitar.
Durante todo este proceso he desarrollado aún mas mi habilidad de liderar ya que si no, no hubieramis avanzado nada y estariamos en blanco. Tambien trabajamos en equipo y eso hizo que se haga mas facil el trabajo.
Todos desarrollamos perfiles del BI, como Pensadores cuando vimos cuales vosas debemos incluir a la casa o cuales no; Indagadores cuando investigamos la forma correcta en la que deberua ser una casa domotica; Mentalidad Abierta cuando aceptamos las ideas de todo el grupo y como estas muchas más.
Tuvimos logros y dificultades como cualquier grupo, un logro fue poder terminar todos los archivos a tiempo y una dificultad fue no tener los materiales en el tiempo que se indico, a parte de eso no puedo decir más, todos trabajamos como un equipo.
Cuando hicimos la Auto evaluacion nos dimos cuenta de los errores que tuvimos al principio, no le habiamos dado importancia pero si que influian, al hacer la co evaluacion nos fijamos del punto de vista de mis compañeron.
Clase 8
Auto y Co-evaluación Etapa A: Indagación y Análisis
El 2 de Julio retomamos las clases de Informática comenzando en el laboratorio, tuvimos que convertir nuestro archivo de Indagacion y Analisis en pdf para poder subirlo a la plataforma moodle. En la hora de mecanica vimos como ibamos a situar las cosas en la tabla MDF y lo que ibamos a hacer para que dichas cosas sean domoticas. Esperamos avanzar mucho más en.las siguientes clases.
Clase 7
Lineado en Base
El jueves 21 de Junio se agrego una hora mas de informatica. Aun no llevamos la tabla por una desorganizacion en nuestro grupo y con la persona que iba a traerla. Nos distribuimos los materiales que deberiamos traer para la proxima clase. Nos revisaron los planos que cada integrante desarrollo y los avances que habiamos hechos.
Clase 6
Dibujos de la maqueta
El lunes 18, llevamos nuestros propios diseños para las maquetas, cada uno con cosas distintas y esto nos permitio poder comparar y contrastar entre todo el grupo para que nos dieramos cuenta que ideas podiamos coger y cuales no. En la primera hora que es la de informatica avanzamos con el archivo de Desarrollo de Ideas y a la segunda hora nos pusimos a ver que materiales ibamos a usar para construir nuestra casa domotica
miércoles, 20 de junio de 2018
Clase 5
Control de Lectura
 En esta clase terminamos el informe de Indagación y Análisis, decidimos como va a ser nuestra maqueta, los materiales que utilizaremos, como estaría ubicado cada cosa. A la segunda hora hicimos una mini lección pero en grupos, los grupos los creaba la computadora, yo no recuerdo haberme equivocado en ninguna ya que también podíamos ayudarnos de una Guía de Diseño y eso fue de mucha utilidad. Me toco hacer la lección dos veces ya que la primera vez la pagina se cayo y borro todo las respuestas que puse.
En esta clase terminamos el informe de Indagación y Análisis, decidimos como va a ser nuestra maqueta, los materiales que utilizaremos, como estaría ubicado cada cosa. A la segunda hora hicimos una mini lección pero en grupos, los grupos los creaba la computadora, yo no recuerdo haberme equivocado en ninguna ya que también podíamos ayudarnos de una Guía de Diseño y eso fue de mucha utilidad. Me toco hacer la lección dos veces ya que la primera vez la pagina se cayo y borro todo las respuestas que puse.Clase 4
Análisis de productos existentes
 En esta clase nos pasamos las dos horas en la sala de informática y fue bueno ya que junto con todo el grupo avanzamos el Informe de Indagación y Análisis. Buscamos un ejemplo de una casa domotizada por cada estudiante perteneciente a nuestro grupo y así buscar los pros y los contras para que en la siguiente clase escojamos la casa que creamos mejor.
En esta clase nos pasamos las dos horas en la sala de informática y fue bueno ya que junto con todo el grupo avanzamos el Informe de Indagación y Análisis. Buscamos un ejemplo de una casa domotizada por cada estudiante perteneciente a nuestro grupo y así buscar los pros y los contras para que en la siguiente clase escojamos la casa que creamos mejor.sábado, 26 de mayo de 2018
Clase 3
En mecánica vimos la diferencia entre peligro y riesgo, la cual era que riesgo es la probabilidad de algo que podría ocurrir y el peligro es cuando el riesgo se hace realidad. Y también vimos:
EXISTEN 7 TIPOS DE RIESGOS
- Fisico
- Mecánico
- Quimico
- Ergonomico
- Ambiental
- Psicosocial
- Biológico
Y en informática hicimos una lección en Kahoot.it, en la que quede en tercer lugar :))
Clase 2
HERRAMIENTAS:
-Para sujetar: Tornillo de Banco, Alicate, Playo
-Para cortar: Cincel, Serrucho, Tijeras, Sierra
-Para girar: Destornillador, Llaves...
-Para golpear: Mazo, Martillo
EPP (equipos de protección personal)
EPP PARTE DEL CUERPO
Gafas Ojos
Orejeras Oídos
Casco Cabeza
Mascarillas Boca
Guantes Manos
Botas antideslizantes Pies
Eso es lo que hicimos en la clase de mecánica y en informática editamos los blogs.
viernes, 18 de mayo de 2018
Clase 1
Primera Clase :)
Este año varias cosas han sido nuevas como el hecho que ya no tenemos las dos horas solamente de informática, si no qué tenemos la primera hora de Mecánica y a la segunda tenemos Informática.
En la clase de Mecánica repasamos los temas que aprendimos el año pasado, en mi opinión todo fue muy fácil ya que sabia lo que estábamos viendo, nos mostró los diferentes tipo de mecánicas como la Industrial, Automotriz y de Ajuste. Algo que también vimos son las funciones de las herramientas y su forma de usarlas.
 A la siguiente hora subimos al salòn de informática, ubicada en el tercer piso, donde creamos un blog y la portada del mismo, algo que tambien hicimos fue escoger una pareja para trabajar durante el quimestre y me agrado ya que nosotros mismos la escogimos.
A la siguiente hora subimos al salòn de informática, ubicada en el tercer piso, donde creamos un blog y la portada del mismo, algo que tambien hicimos fue escoger una pareja para trabajar durante el quimestre y me agrado ya que nosotros mismos la escogimos.
Suscribirse a:
Comentarios (Atom)